

Learn about the GrabCAD Platform
Get to know GrabCAD as an open software platform for Additive Manufacturing
Visit our new homepage
Thanks to everyone who participated! We believe these entries are the best robot gripper testing solutions based on our needs. In fact, we saw many creative and functional ideas from the GrabCAD Community in this list of finalists. You can find the Pareto plot results of the finalists at the link, below.
http://blog.grabcad.com/wp-content/uploads/2014/06/Finishers.jpg
We're hoping that plot does most of the talking for the jury as this Challenge was based on how well entries performed there along with their manufacturability. You can see their rating for manufacturability, below as well. Outstanding work from all the GrabCADrs involved in this one!

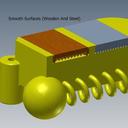
Good, simple, efficient manner to meet the design parameters. The generic shapes are probably representative of many target objects. It is great that this concept besides the various shapes also provides the possibility to integrate the tool in testing machines. It considers how grip tests might be performed and provides a simple solution for it (i.e., on a tensile testing machine) while keeping the entire system intact.
Pareto plot performance: 15
Manufacturability: 15

Complex but very functional once it can be manufactured. The set of shapes represented here is good, though it would probably be better if each of the shapes could be physically isolated. It might be difficult to test a gripper's interaction with only one of the features without contacting another feature.
Pareto plot performance: 15
Manufacturability: 14

It is great that this concept besides the various shapes could also challenge the balancing of the construction while being assembled. The skills could be more or less challenged using thicker or thinner "base stand."
Pareto plot performance: 15
Manufacturability: 13
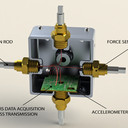
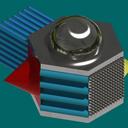
This solution looks one step beyond the design intent by integrating force sensors into the target object. It's also great that the designer has considered how different shapes can be assembled around the sensing core. This concept considers that it is not always enough to "just" grip the part "somehow", but also that is it is gripped safely (force). Appears to be limited in how small it could be made to interface with “smaller” grippers.
Pareto plot performance: 15
Manufacturability: 7
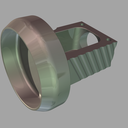
We like the simplicity of this solution. It appears to be an object that lends itself to traditional manufacturing techniques.
Pareto plot performance: 1
Manufacturability: 12
We like the idea of having a range of surface curvatures on a single object, though it might be better for practical reasons (but not as aesthetically pleasing) to not have each of the surfaces starting from a cut-out on a surface of the cube. For example, if the surface should be convex outwards then it should start from the outermost face of the cube and not from an already lowered position relative to the face. We also like that the user can add mass to the core of the cube.
Pareto plot performance: 1
Manufacturability: 11
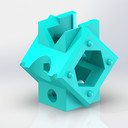
Compact design that addresses all gripper functionality.
Pareto plot performance: 1
Manufacturability: 10
Good idea! The generic shapes are probably representative of many target objects, though they might be more useful as individual components. I think it's particularly clever to integrate modular pieces with different surface properties. It is great that this concept also challenges the gripper ability to grip different material properties. This enables testing of different porosities which is a critical issue for vacuum based grippers. We would like to have seen an ID surface large enough to interface with a two or three jaw ID gripper, too.
Pareto plot performance: 1
Manufacturability: 9

This compact, clever and aesthteically pleasing design enables grippers to test not only a range of simple objects but also their ability to assemble simple components.
Pareto plot performance: 1
Manufacturability: 8

Good solution, and good producability. The range of shapes (especially in the last image) is good and likely representative of many target objects. The designer indicated in the description that each part could be attached to/detached from the center, for example, using screws. This is probably better to enable the isolation of shapes during testing.
Pareto plot performance: 1
Manufacturability: 5

Abstract art meets design intent. Not only is the range of objects interesting and likely representative of many target objects, but designing the parts to test robot grippers' ability to assemble components is interesting. This design is very modular yet simple.
Pareto plot performance: 1
Manufacturability: 4

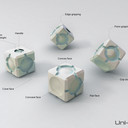
The range of generic objects is good and likely representative of many target objects. Some of the modular objects, like the cube that can be separated into smaller "teeth" and a thin plate, is great for easily realizing a variety of objects with a compact design. The hollow sphere is also a clever way to control the mass or inertia of an object.
Pareto plot performance: 1
Manufacturability: 3
Good array of different shapes and structures.
Pareto plot performance: 1
Manufacturability: 2

This is a very creative solution. Ram Ganesh produced a multidimensional gripper test object. Different shapes and structures that maybe can even be disassembled for gripping tests in case a gripper would interfere with the overall tool. And, we like chess as a nice, overall theme.
Pareto plot performance: 1
Manufacturability: 1
 Stephan Eifler
Stephan Eifler Sara Sigel
Sara Sigel Ralf Becker
Ralf Becker John Amend
John Amend John Hall
John Hall AGI
AGI Sam Bouchard
Sam Bouchard Nadia Cheng
Nadia Cheng