Learn about the GrabCAD Platform
Get to know GrabCAD as an open software platform for Additive Manufacturing
Visit our new homepage
Home
Control
Shop
Streamline Pro
Partner Program
Print
Community
Log in
Library
Challenges
Groups
Questions
Tutorials
Engineers
Blog
Log in
Learn from thousands of free Tutorials.
New user?
Join the community
or
log in.
Tutorials
Most liked all time
Recent
Most liked
Most viewed
Most commented
This week
This month
All time
Category
Design & CAD
Modeling
Drafting
Assemblies
BOM
Dimensioning / Tolerancing
Translations
Manufacturing & CAM
3D Printing
Tooling
NC Machining
Composites
Measurement / Inspection
Simulation & CAE
FEM
CFD
Kinematics
Process Simulation
Engineering Fundamentals
Theory
Process
Standards
Other
Software
Snagit
Alibre Design
ArchiCAD
AutoCAD
AutoCAD Electrical
Autodesk 3ds Max
Autodesk Alias
Autodesk Inventor
Autodesk Maya
Autodesk Revit
Autodesk 123D
BricsCAD
Bentley MicroStation
BlenderCAD
BobCAD-CAM
CATIA
Delmia
DraftSight
FreeCAD
Femap
Fusion 360
Geomagic Design
IronCAD
JT
Kompas-3D
KeyCreator
KeyShot
Lagoa
Luxology
Mastercam
Moi3D
NX Unigraphics
OBJ
Onshape
OpenSCAD
Parasolid
Powermill
Powershape
Pro/Engineer Wildfire
PTC Creo Parametric
PTC Creo Elements
Rhino
SpaceClaim
SOLIDWORKS
solidThinking Evolve
Solid Edge
SolidFace
STEP / IGES
SketchUp
STL
TopSolid
TinkerCAD
T-Flex CAD
TurboCAD
VectorWorks
ViaCAD 3D
VRML / WRL
ZW3D
GrabCAD Print
Rendering
GrabCAD Community
GrabCAD Workbench
Text file
3D Manufacturing Format
Cinema 4D
Other
Skill level
All levels
Beginner
Intermediate
Expert
spherical robot
×
3D Modeling and Animation of a Spherical Robot in 3DS Max - Part II
Yoana Ivanova
in
Modeling
1
0
Expert
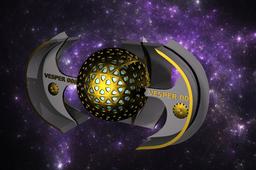
The conceptual model creation is described in the following article: IVANOVA, Ioana and Stefka NENOVA, Computer Graphics as a Means of Increasing the Quality of Military Education, Report, Sofia: Yearbook of the Military Academy, 2013, pp. 141-155; http://rnda.armf.bg/wp/wp-content/uploads/2015/03/Binder-1-322.pdf; ИВАНОВА, Йоана и Стефка НЕНОВА, Компютърната графика като средство за повишаване качеството на военното образование, Доклад, София: Годишник на Военна академия, 2013, стр. 141- 155, http://rnda.armf.bg/wp/wp-content/uploads/2015/03/Binder-1-322.pdf CREATING A GOLDEN MATERIAL: 1. Open Material Editor (hotkey "M"): the main settings of the material (ambient, diffuse, glossiness and specular level) are shown in Step 1. 2. Coloring the inner sphere: it should contrast to bring out the golden material of the outer grid. An example is given in Step 2. 3. Adding lights and shadows: this is one of the most complex stages of modeling in 3DS Max, usually done right before animating the model. It should be noted that lights can also be animated. They are selected from the main menu Create > Light. The favorite light of the author is Omni. Each of the lights can be adjusted appropriately to produce realistic shadows and highlights.
Autodesk 3ds Max
aerospace engineering
space infrastructure
texturing
gold material
spherical robot
3D Modeling and Animation of a Spherical Robot in 3DS Max - Part I
Yoana Ivanova
in
Modeling
1
0
Expert
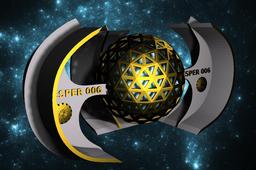
The conceptual model creation is described in the following article: IVANOVA, Ioana and Stefka NENOVA, Computer Graphics as a Means of Increasing the Quality of Military Education, Report, Sofia: Yearbook of the Military Academy, 2013, pp. 141-155; http://rnda.armf.bg/wp/wp-content/uploads/2015/03/Binder-1-322.pdf The development of spherical robots dates back to the 1990s. Their advantage is that they move in all directions, and most often this happens with changes in the center of gravity. Some models use a system of counterweights, which helps to stay still on slopes with an inclination of 33° (Pico Rover). Some are used to study the environment, others - on the lunar surface. They are usually equipped with a high-resolution camera. The robot is tentatively named by the author VESPER-006 ("Vesper" means Venus) due to the fact that the planet Venus is a "double" of the Earth due to the close dimensions, although the surfaces of the two planets are completely different. The spherical shape was purposefully chosen to make the robot to resemble the planet it was inspired by. VESPER-006 is thought to be with an innovative design and drive method. It is suitable for research and analysis of the environment regardless of what it is (air, liquid or field). The temperature range is also wide (between -40 and +120°C). The mechanism must be able to reach the point with coordinates (x, y, z) in time space [t]. The design is stylish, simple and facilitates the rotation of the robot around its axis, as well as its movement in space. The dimensions must be such that they can take the weight of the engine and equipment. Apart from an aesthetic purpose, to make the design more interesting, the three side elements (Stands) have been added for their practical function - to stabilize the robot when it is in a static position. The main steps in the modeling process are as follows: 1. Modeling the side element: first a curve with the desired shape is drawn using Create > Shapes > Line. After that it is extruded by Modifier Panel > Extrude tool. To edit the object, right-click on it and select Convert to Editable Poly. The model can be modified by selecting individual polygons, edges or vertices and using the Extrude and Bevel tools. 2. Clone the side element: by right-clicking on it and selecting Clone. 3. Modeling the spherical body: the outer Geosphere is transformed into a grid by selecting all polygons, Inset and Extrude. The selected polygons should be removed.
Autodesk 3ds Max
aerospace engineering
space infrastructure
spherical robot